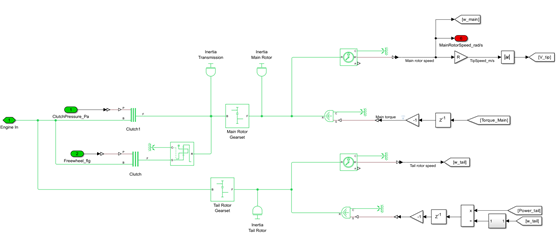
• 저피탐 수직이착륙기용 가변 RPM 모듈 기술 연구
– 저피탐 수직이착륙기용 가변 RPM 모듈의 개념/상세 설계 및 해석
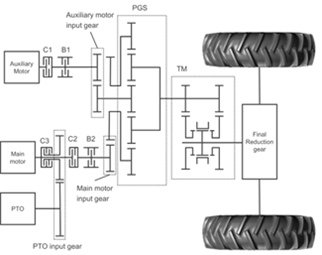
– 저피탐 수직이착륙기용 가변 RPM 모듈의 제어 알고리즘 개발 및 검증 • 듀얼 모터 타입 전기 구동 트랙터 구조 설계 및 제어 알고리즘 개발
– 듀얼 모터 타입 전기 구동 트랙터 파워트레인 최적 설계
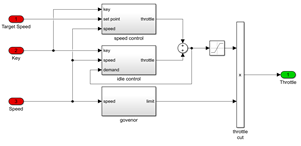
– 듀얼 모터 타입 전기 구동 트랙터 제어 알고리즘 개발 • 공용화가 가능한 100kW급 듀얼클러치 변속기 시스템 및 표준형 제어 플랫폼 개발
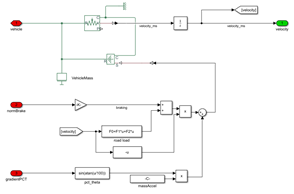
– 듀얼 클러치 타입 트랙터 시뮬레이션 모델 개발, 검증 및 최적화
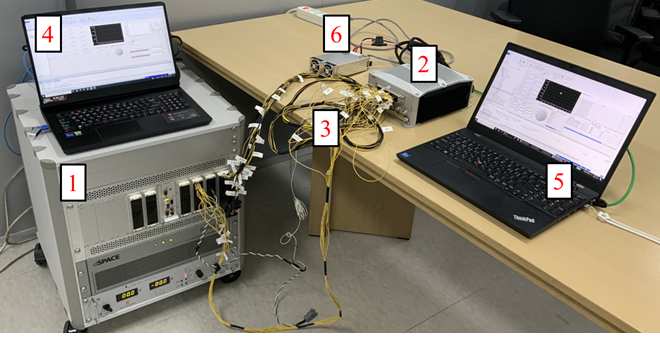
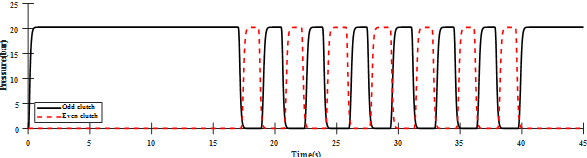
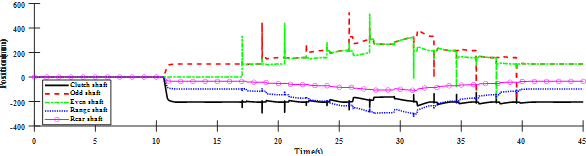
– Hardware-in-the-loop 시뮬레이션 환경 구성 및 제어 알고리즘 검증 |